|
Multimedia
Labor
During
my PhD (2002-2006) my work was closely related with the MIP lab, which
is well equipped for
the animation analysis of humans. My goal was to make use of the whole
hardware and to integrate different subsystems, in a way that robust
and efficient analysis of a person moving in front of the screen
became possible. The integration included three
cameras for observing the
scene, 2 microphones for audio detection and issuing commands, 2
projectors for 3D-stereo visualization and 9 PCs for processing the
data and rendering.
The movie (MPEG-1 9MB) on the right shows our person tracking and
multidisplay rendering system,
where 4 linux PCs are evaluating the person's head position and 5 PCs
are rendering the scene. The user's head position is computed and the
scene view is adapted according to the head's height. By walking around
on the floor, the person can navigate through the scene, standing in
front means forward, left means rotate left and so on. For good
visibility of the displays the scene has to be rather dim lighted,
which makes the image processing very difficult. A Baysian approach
using particle systems makes it possible in real-time though (see publications CAIP2005 ).
The
system is also used for public demonstrations. In this movie (25MB MPEG-1)
Prof. Koch first introduces the system. Later in the video, guests from
the
"Girl's Day" are enjoying the interaction themselves. The movie shows
also very well the difficulties we are facing in this environemnt.
|
|

An
overview of the interaction space (click for 9MB MPEG-1 movie)
|
|
Real-Time
Face Tracking
Two pan-tilt cameras track the user's face during
the interaction. The tracking is especcially difficult, becuse
the lighting is not only rather dim but changes dramatically during the
rendering, as the main light in the scene is emitted from the screens.
Therefore the color of light depends on the current visualized scene
part.
We achieve robust tracking with a CONDENSATION approach using face
color and a face detection/recognitin algorithm. The face color is
stored as a dynamic histogram. While the face detection is a adapted
version of a trained classifier cascade as available in
openCV. Our adaption enables a faster use within the
CONDENSATION. Results of the tracking can be seen in the right.
The image shows the sample distribution of the CONDENSATION particle
filter. The state/position of particles is here the image position and
the scale of the face. Brighter rectangles represent higher
probabilties. Visible in the movie is also the panning and tilting of
the camera. Please note that the camera does not move constantly,
but as seldomly as possible, such that the calculated projection
matrix of the cam stays valid as long as possible.
|
|
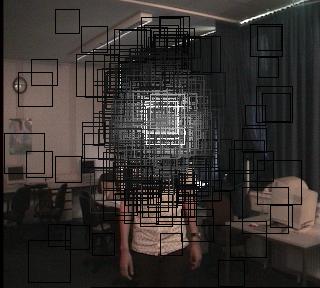
Sample
distribution of the CONDENSATION particle filter
(click for 5MB MPEG-1 movie)
|
|
Gesture
Tracking and Recognition
To enable real interaction with the virtual scene
pointing gestures are useful. Their detection and recogntion is
realized in our system by tracking of one hand again with a
CONDENSATION approach. Both pan/tilt cameras are used additionally for
tracking of the hand. Used features here are again skin color (taken
the same as the face) and movement. The movement is calulated as the
temporal image gradient over a few frames. The movement is a good
feature for hand detection, as people tend to move their hands always,
if they move at all (with respect to the global coordinate system).
In the movie the samples with a certain probability ae shown. The red
cross marks the estimated hand position, which is calculated as the
weighted mean of all sample positions. The state is here only 2D (the
image position of the hand. The size of the red cross shows the
uncertainty of the estimated position. This output of the particle
filter is very useful for sensor fusion and makes the system more
stable and robust.
The hand tracking integrated in the whole system can be seen in this movie(6MB).
The pointing ray of the person is calculated as the line extension
between head and hand. The intersection point with the virtual scene
can be calculated due to the fully calibrated system. However the
position estimate is rather noisy, as visible by observing the
yellow ball. This is due to the small amount of cameras used for
triangulation (only 2) and due to the blob like features taken (color
and movement).
|
|
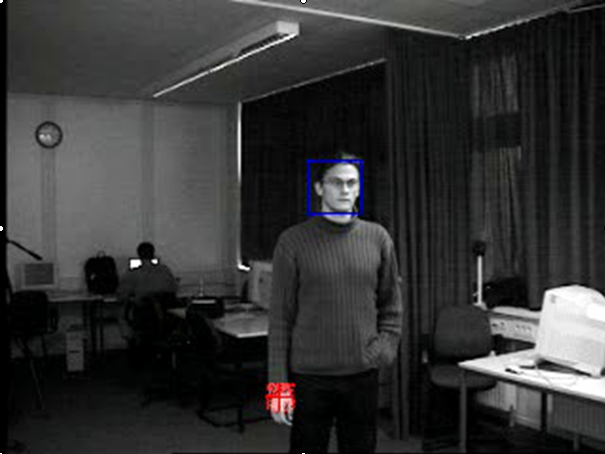
Hand
and face tracking together (3MB movie)
|









